This project is a part of the final project of the University of Michigan EECS 599 Autonomous Driving course. The project was submitted, competed and rated as a Kaggle competition . Our group got 6th out of 35 different groups.
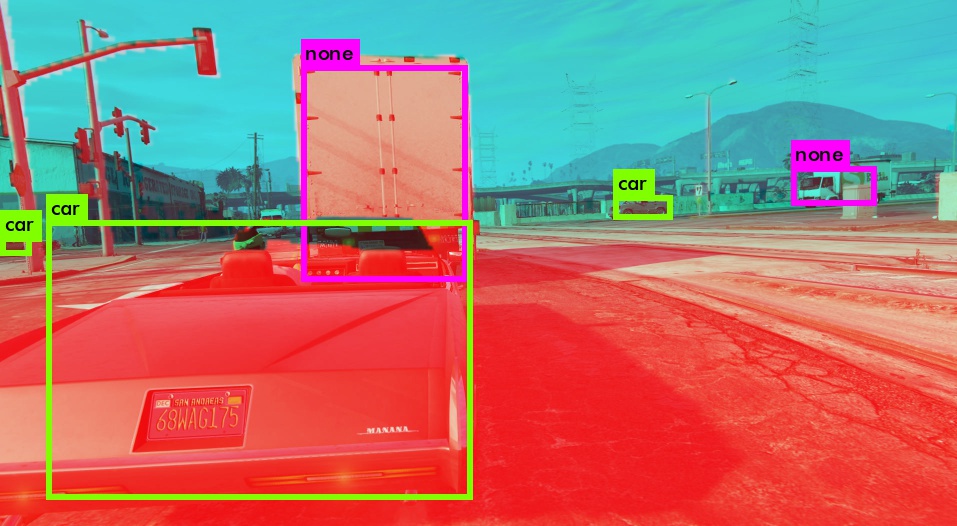
The dataset includes RGB images and correlated lidar depth information from simulated scenes. I guess it was from GTA5 or using similar game engine. A very frustrating thing in this project was that, only mid-sized cars, compact cars or SUVs were our target of detection, which means we need to distinct van and trucks, and do not report them in our results.
We transformed the lidar information to the same size of a layer of the RGB image using bilateral filter , and fine tuned the network from pretrained yolo-v2 from darknet.
You can also find our pdf report in which we reported the details of the project.