In this project, we aimed to solve the problem of estimating depth information from single images. We tested our algorithms on both Kinect style data and correlating RGB image and Lidar data.
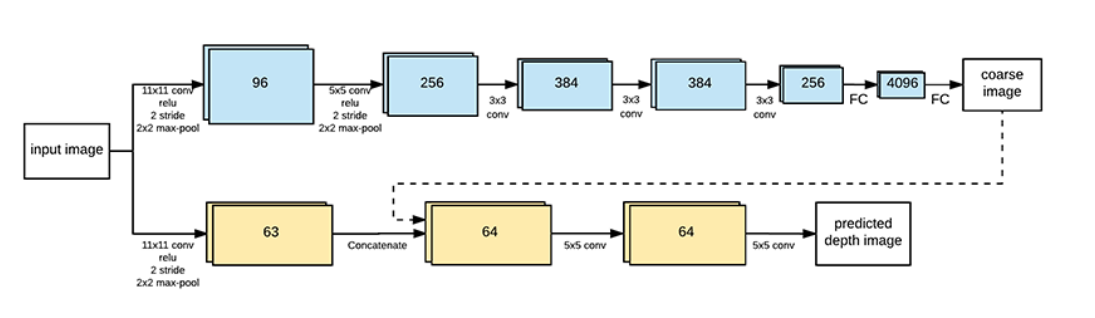
Many sorts of deep neural networks was covered in this project, but we found that the network structure from Eigen, et.al worked best. We finally settled down and used a similiar network structure.
And we achieved acceptable results on different datasets.
| Origin Image | Ground Truth | Predicted Depth |
|---|---|---|

|

|

|
We also have a pdf version of project report including different metrics.